|
|
||
|---|---|---|---|
|
ProntoJAUS Software Development Kit* Click here to see the latest JAUS updates. Video
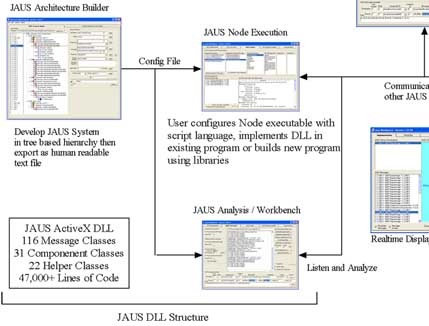
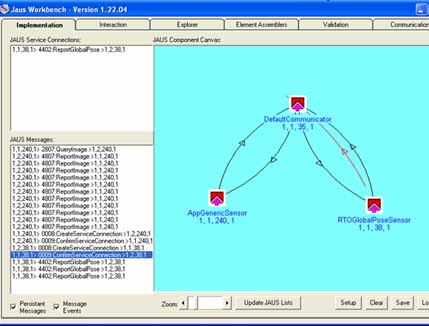
One of the first of its kind, the ProntoJAUS from Kairos Autonomi enables unique unmanned and robotic systems to communicate and operate with each other independent of design. The ProntoJAUS provides a common conceptualized view of all robotics regardless of each robot’s hardware or software. With this software, two unique robots are able to share messaging schemes and information for optimal interoperability. *The ProntoJAUS is based upon the Joint Architecture for Unmanned Systems developed by industry collaboration. Visit http://standards.sae.org/as6091/ for more information. Using shared memory architectures, ProntoJAUS utilizes a single DLL structure to achieve JAUS interoperability. Other components include functional, stand-alone, file-defined JAUS Nodes, a Builder that generates complete JAUS system architectures and an Interrogator that functions independent of the “a priori” limitation. Features
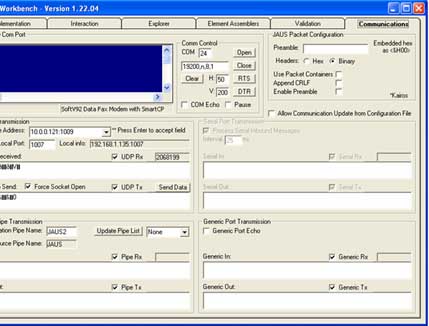
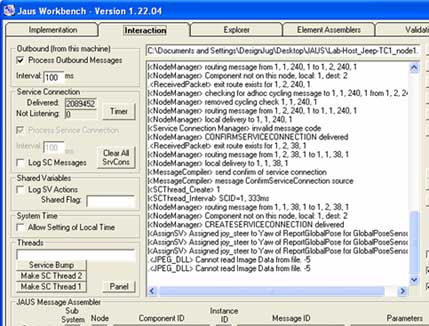
Communications
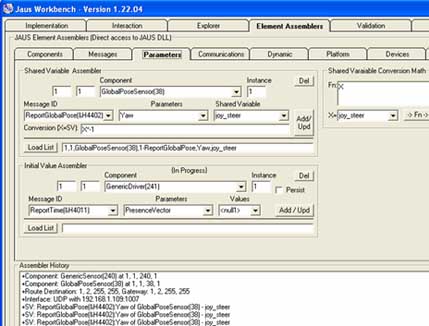
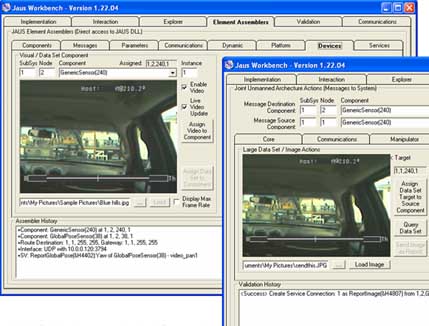
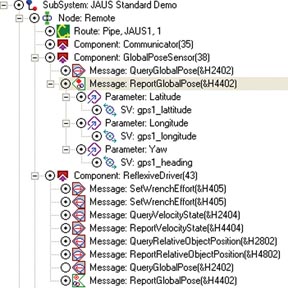
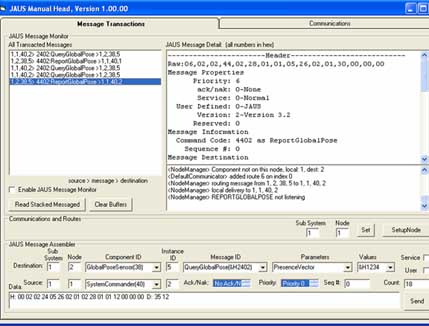
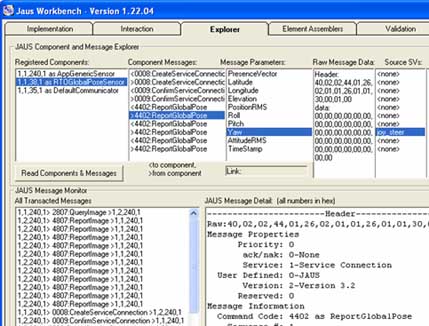
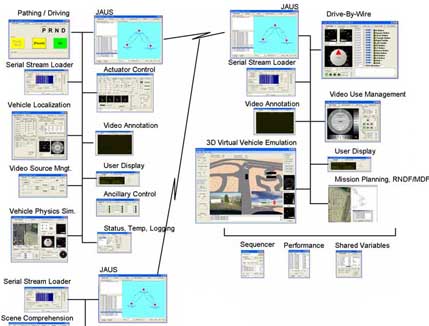
Components JAUS Library — DLL and type libraries JAUS Workbench — Interface directly with the DLL, validate and manage messages, communicate. JAUS Node — Create functional stand-alone JAUS nodes JAUS Builder — Generate complete JAUS system architectures in a visual, hierarchal view JAUS Manual Head — Perform ad-hoc interrogation of JAUS system independent of "a priori" limitation The Builder provides a hierarchal approach to JAUS system creation and then generates a human-readable text file that defines the entire system. The Node program can then read this file to create the user-defined JAUS system. Diagnostic tools speed verification of system functionality. Applications ProntoJAUS applications range from creating a JAUS system with zero user-written software using existing executables, to creating stand-alone JAUS components with a software pipe interface, to utilizing an existing system with shared variables as the only interface, all the way to constructing a full system from the ground up. The DLL has all JAUS message and component classes, as well as many helper classes. JAUS components can be instantiated with as little as one line of code, and you can instantiate an entire JAUS system from one text file. Other implementation features include:
The ActiveX DLL contains ad hoc messages with diagnostic component, either global or addressed message logging and access to message parameters with shared variables and initial values. You can also create dynamic components and messages to meet unique requirements. The Kairos Autonomi™ ProntoJAUS is the first step in meeting the Department of Defense mandate of unmanned system interoperability, and it offers a smooth avenue for JAUS compliance. |
|||
|
|||